A triangulação por luz estruturada (Structured light) funciona pela estimativa das coordenadas pertinentes à forma e obtida via padrões geométricos de luz branca conhecidos. Esses padrões são projetados sobre o objeto e capturados pelo equipamento já previamente calibrado. A câmera faz a captura da borda das linhas e calcula suas coordenada XYZ.
São feitas capturas de vários ângulos do objeto cuidando para que haja áreas de sobreposição para facilitar o alinhamento. As coordenadas, representadas por pontos, geram uma nuvem de pontos (point cloud) que será convertida em malha de polígonos ou triângulos (poligonal meshes). Essas malhas são a representação das superfícies do objeto digitalizado.

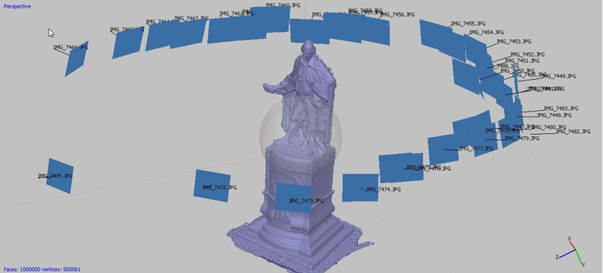
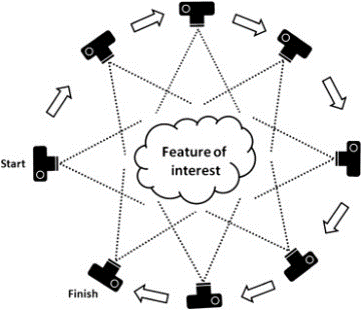
Já a reconstrução 3D feita pela fotogrametria se baseia em pontos físicos ou coordenadas que podem ser apontadas, manualmente ou automaticamente, através de fotografias sequenciais sob vários ângulos diferentes e com o auxílio de marcadores (que não são obrigatórios nos sistemas mais recentes). “As estimativas das coordenadas 3D são determinadas por algoritmos específicos que determinam a correspondência entre os pontos nas diferentes imagens. ”